Software & Datasets
Causal Inference
Software
ROS-Causal – A ROS-based framework that enables onboard data collection and causal discovery in human-robot spatial interactions scenarios.
CausalFlow – A collection of methods for causal discovery from time-series. It includes:
- F-PCMCI – Causal discovery augmented with a feature-selection method based on Transfer Entropy;
- CAnDOIT – CAusal Discovery with Observational and Interventional data from Time-series.

PeopleFlow – A Gazebo-based simulator designed to model context-sensitive human-robot spatial interactions in shared workspaces, featuring realistic human and robot trajectories influenced by time, environment layout, and robot state, and supporting a large number of agents.
Datasets
Causal HRSI Dataset – A dataset of 3D LiDAR point clouds for causal analysis of human-robot spatial interactions, collected from a mobile robot platform.
TinyML
Software
MicroFlow – Robust and efficient TinyML inference engine in Rust to deploy machine learning models on embedded systems.
Continual Nanodet – Fast and computationally efficient Continual Learning for NanoDet anchor-free object detection models.
Datasets

TiROD – A comprehensive dataset collected using the on-board camera of a small mobile robot, designed to benchmark the adaptability of continual object detectors across various domains and classes.
Human Detection, Tracking, and Monitoring
Software
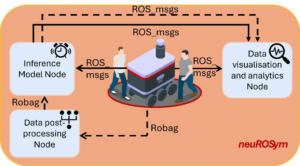
neuROSym – ROS package for online human motion prediction and visualization, based on a neuro-symbolic approach for enhancing the accuracy of multivariate time-series prediction.
WTFACTS – ROS package to manage the creation, query and modification of wavelet-based models for temporal series forecasting.
FLOBOT software – ROS libraries for human detection and tracking with a mobile robot, including 3D LiDAR-based tracking.
Bayesian People Tracking – ROS library with classes and methods for Bayesian estimation, including EKF, UKF, and SIR Particle Filters, specifically designed for people tracking with mobile robots. It also includes Nearest Neighbour and JPDA data association algorithms for dealing with multiple targets.
Datasets
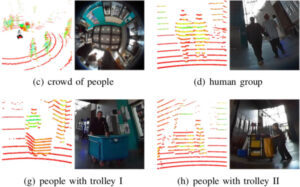
3D Point Cloud Dataset for People Detection – A dataset of 3D LiDAR point clouds for human detection with a mobile robot.
FLOBOT Perception Dataset – A dataset collected by a robot scrubber in large environments (airport, warehouse, supermarket), using 3D LiDAR and RGB-D camera for human detection and tracking, plus RGB-D and stereo cameras for dirt and object detection.

LACE House Domotic Sensors Dataset – A dataset of multiple domotic sensors (e.g. presence and contact detectors) for human activity monitoring in smart environments.
RGB-D-T Re-identification Dataset – A dataset of depth and thermal images for human re-identification with a mobile robot.

Thermal Physiological Monitoring Dataset – A dataset of thermal images for human physiological monitoring (temperature, respiration, heartbeat) with a mobile robot.
Social Activity Datasets – A collection of datasets for social activity recognition with a depth camera.